Examen des différents choix technologiques en matière de capteurs de proximité et de distance
Avec la contribution de Rédacteurs nord-américains de DigiKey
2024-09-18
L'utilisation de capteurs de proximité et de distance pour détecter la présence et l'emplacement d'éléments sans contact physique peut constituer un aspect important du contrôle des processus industriels, tels que la manutention des matériaux, les machines agricoles, les opérations de fabrication et d'assemblage, ainsi que le conditionnement des denrées alimentaires, des boissons et des produits pharmaceutiques.
Ces capteurs sont disponibles dans diverses technologies, notamment photoélectrique, laser, inductive, capacitive, magnétique et ultrasonique. Pour déterminer le meilleur choix pour une application donnée, il faut tenir compte de facteurs tels que la portée, la taille, la précision, la sensibilité, la résolution et le coût.
Dans de nombreuses applications, le matériau de l'objet à détecter représente un facteur clé. Certains capteurs se comportent différemment selon qu'il s'agit de surfaces dures ou fibreuses, tandis que d'autres capteurs peuvent être affectés par la couleur ou la réflectivité de l'objet.
Cet article passe en revue les technologies de capteurs de proximité sans contact couramment disponibles, en examinant leur fonctionnement, leurs caractéristiques de performance de base et certains modèles de capteurs représentatifs de SICK, ainsi que quelques-unes des applications prévues.
Capteurs photoélectriques
Les capteurs photoélectriques, comme les capteurs de proximité photoélectriques W10 de SICK, sont simples à utiliser et à installer et sont disponibles avec une gamme de fonctionnalités adaptées à de nombreuses applications. La conception robuste des capteurs W10 les rend adaptés à la détection précise d'objets dans des environnements difficiles. L'écran tactile intégré accélère le réglage des paramètres et le déploiement des capteurs (Figure 1).
 Figure 1 : L'écran tactile de ces capteurs photoélectriques permet d'accélérer la mise en service et le déploiement. (Source de l'image : SICK)
Figure 1 : L'écran tactile de ces capteurs photoélectriques permet d'accélérer la mise en service et le déploiement. (Source de l'image : SICK)
La fonctionnalité d'apprentissage disponible permet aux concepteurs d'adapter ces capteurs aux exigences spécifiques des applications. De plus, des fonctions intégrées telles que les réglages de vitesse, les modes de mesure standard et de précision, ainsi que la suppression du premier plan et de l'arrière-plan permettent d'utiliser un seul capteur dans un grand nombre d'applications. Cette série de capteurs se décline en quatre variantes, qui diffèrent par leurs distances de fonctionnement et leurs possibilités de montage.
Suppression de l'arrière-plan
Les capteurs de proximité photoélectriques avec suppression de l'arrière-plan (BGS) utilisent la triangulation entre les éléments émetteurs et récepteurs. Les signaux provenant d'objets situés derrière la zone de détection définie sont supprimés. Par ailleurs, la technologie BGS de SICK ignore les objets hautement réfléchissants en arrière-plan et peut gérer des conditions d'éclairage ambiant difficiles.
La suppression de l'arrière-plan est particulièrement utile lorsque l'objet cible et l'arrière-plan (comme un tapis roulant) présentent une réflectivité similaire ou si la réflectivité de l'arrière-plan peut varier et perturber la détection.
Suppression du premier plan
Les capteurs de proximité photoélectriques avec suppression du premier plan (FGS) sont capables de détecter des objets à une distance définie. Tous les objets situés entre le capteur et la distance de détection (définie sur l'arrière-plan) sont détectés. Pour garantir la fiabilité de la détection, l'arrière-plan doit être relativement lumineux et ne doit pas varier en hauteur.
Lorsque des objets se trouvent sur une surface réfléchissante comme un tapis roulant blanc ou de couleur claire, la suppression du premier plan peut permettre d'améliorer la détection. Plutôt que de détecter la lumière réfléchie par l'objet, le capteur détecte l'objet par l'absence de lumière réfléchie par le tapis convoyeur.
Capteurs rétroréfléchissants
Dans un capteur rétroréfléchissant, la lumière émise se heurte à un réflecteur et la lumière réfléchie est évaluée par le capteur. Les erreurs peuvent être minimisées grâce à l'utilisation de filtres polarisants. Les films étirables et les emballages en plastique transparents peuvent interférer avec ces capteurs. La réduction de la sensibilité des capteurs peut aider à surmonter ces difficultés. De plus, le remplacement des émetteurs de lumière infrarouge standard par des lasers peut permettre des plages de détection plus longues et une résolution plus élevée.
Les performances d'un capteur rétroréfléchissant peuvent être améliorées en utilisant une hystérésis de commutation inférieure à la normale. Dans ces conceptions, même une atténuation minimale de la lumière entre le capteur et le réflecteur, causée par des bouteilles en verre par exemple, peut être détectée de manière fiable. SICK propose également un système de surveillance appelé AutoAdapt qui régule et adapte en permanence le seuil de commutation en réponse à l'accumulation progressive de contaminants susceptibles d'entraîner une défaillance du système de détection.
Capteurs à faisceau traversant
Contrairement aux capteurs rétroréfléchissants, les capteurs à faisceau traversant utilisent deux dispositifs actifs : un émetteur et un récepteur. La détection à faisceau traversant permet de plus grandes portées de détection. Le remplacement des émetteurs IR par des diodes laser permet d'améliorer encore la distance de détection tout en maintenant une résolution élevée et une détection précise.
Capteurs à fibre optique
Les capteurs à fibre optique correspondent à une variante des conceptions à faisceau traversant. Dans un capteur photoélectrique à fibre optique, l'émetteur et le récepteur sont regroupés dans un seul logement. Des câbles à fibres optiques distincts sont utilisés par l'émetteur et par le récepteur. Ces capteurs sont particulièrement adaptés à une utilisation dans des applications à haute température, ainsi que dans des environnements dangereux et difficiles.
Réseaux de capteurs photoélectriques
Les capteurs photoélectriques de la famille RAY26 Reflex Array, comme le modèle 1221950, permettent une détection fiable des objets plats ainsi qu'une mise en service rapide. Associés à un réflecteur, les capteurs photoélectriques détectent également des objets de petite taille, plats, transparents ou irréguliers mesurant seulement 3 mm. À l'intérieur d'un réseau lumineux uniforme de 55 mm de haut, les capteurs détectent le bord avant de l'objet. Cela signifie que même les objets perforés peuvent être détectés de manière fiable sans commutation complexe (Figure 4).
 Figure 2 : Les réseaux de capteurs photoélectriques peuvent détecter des objets mesurant seulement 3 mm dans un champ de 55 mm de hauteur. (Source de l'image : SICK)
Figure 2 : Les réseaux de capteurs photoélectriques peuvent détecter des objets mesurant seulement 3 mm dans un champ de 55 mm de hauteur. (Source de l'image : SICK)
Capteurs de distance à laser
Les concepteurs d'applications telles que la surveillance du niveau dans les conteneurs de stockage, la détection de la position d'objets sur les convoyeurs, la position XY de l'axe dans les systèmes de chariots élévateurs automatisés, le positionnement vertical des grues dans les entrepôts et les convoyeurs aériens, ainsi que la surveillance du diamètre pendant l'enroulement des bobines, peuvent se tourner vers les capteurs de distance à laser DT50. Ces capteurs permettent de mesurer la distance en temps de vol (ToF) jusqu'à plusieurs mètres en utilisant la lumière laser réfléchie pour assurer une immunité à l'éclairage ambiant, ainsi qu'un fonctionnement précis et fiable.
Par exemple, le modèle DT50-2B215252 dispose d'une portée de 200 à 30 000 mm et de plusieurs fonctionnalités spéciales, notamment :
- Logement robuste avec indices de protection IP65 et IP67
- Possibilité de fournir jusqu'à 3000 mesures de distance par seconde
- Temps de réponse minimal de 0,83 ms
- Le logement compact convient à un large éventail d'applications allant des robots industriels à la mesure des hauteurs de remplissage des conteneurs de stockage
Mesures haute résolution à l'aide de statistiques
La mesure de distance haute définition plus (HDDM+) est une technologie de mesure ToF à haute résolution qui peut être utilisée dans les capteurs de détection et d'estimation de la distance par la lumière ou par laser (LiDAR). Contrairement aux technologies de détection à impulsion unique ou à corrélation de phase, HDDM+ correspond à un processus de mesure statistique.
Le logiciel du capteur évalue statistiquement les échos de plusieurs impulsions laser afin de filtrer les interférences provenant de sources telles que les vitres, le brouillard, la pluie, la poussière, la neige, les feuilles, les clôtures et d'autres objets, afin de calculer la distance par rapport à la cible visée. La mesure de la distance qui en résulte peut présenter un niveau élevé de certitude même dans des conditions ambiantes difficiles (Figure 5).
 Figure 3 : Le logiciel HDDM+ de SICK utilise un processus d'évaluation statistique pour éliminer le « bruit » provenant d'éléments tels que les vitres, le brouillard, la pluie, la poussière, la neige, les feuilles et les clôtures. (Source de l'image : SICK)
Figure 3 : Le logiciel HDDM+ de SICK utilise un processus d'évaluation statistique pour éliminer le « bruit » provenant d'éléments tels que les vitres, le brouillard, la pluie, la poussière, la neige, les feuilles et les clôtures. (Source de l'image : SICK)
Parmi les applications types de la technologie HDDM+ figurent la mesure de distance pour le contrôle qualité dans la production électronique, la détection multidimensionnelle d'objets LiDAR et la détermination de la position dans la construction mécanique et industrielle, ainsi que la détermination de la position de grues ou de véhicules industriels.
La portée de détection des capteurs HDDM+ atteint 1,5 km sur une bande rétroréfléchissante. Par exemple, le modèle DT1000-S11101 affiche une portée atteignant 460 m avec une précision de mesure typique de ±15 mm pour les objets naturels et une résolution réglable de 0,001 à 100 mm.
Capteurs inductifs
Les capteurs de proximité inductifs comme ceux de la série IME de SICK peuvent détecter des objets métalliques ferreux et non ferreux. Ces capteurs sont constitués d'un circuit résonant inductance-condensateur (LC) qui génère un champ électromagnétique alternatif haute fréquence. Ce champ est atténué lorsqu'un objet métallique pénètre dans la zone de détection. L'amortissement est détecté par le circuit d'évaluation des signaux et par un amplificateur qui produit le signal de sortie (Figure 4).
 Figure 4 : Un capteur de proximité inductif de base se compose d'un circuit LC qui produit un champ alternatif, d'un évaluateur de signaux et d'un amplificateur. (Source de l'image : SICK)
Figure 4 : Un capteur de proximité inductif de base se compose d'un circuit LC qui produit un champ alternatif, d'un évaluateur de signaux et d'un amplificateur. (Source de l'image : SICK)
La distance de détection nominale (Sn) et la distance de détection sécurisée (Sa) constituent deux spécifications importantes pour la distance de détection de plusieurs technologies de capteurs de proximité. La distance de détection nominale (Sn) ne prend pas en compte les tolérances de fabrication ni les influences externes telles que la température de fonctionnement. La distance de détection sécurisée (Sa) prend en compte à la fois les tolérances de fabrication et les variations des conditions de fonctionnement. La distance Sa représente généralement environ 81 % de la valeur de Sn. Par exemple, pour le modèle de capteur inductif IME08-02BPSZT0S, la distance Sn est de 2 mm, celle de Sa de 1,62 mm.
Détection capacitive
À l'instar des capteurs inductifs, les capteurs de proximité capacitifs font appel à un oscillateur. Dans ce cas, un condensateur ouvert est utilisé là où l'électrode active du capteur produit un champ électrostatique par rapport à la terre. Ces capteurs sont capables de détecter la présence d'un large éventail de matériaux, y compris des objets métalliques et non métalliques.
Lorsqu'un objet pénètre dans le champ électrostatique, l'amplitude des oscillations dans le circuit résonant change en fonction des propriétés diélectriques du matériau. L'évaluateur de signaux détecte ce changement, tandis qu'un amplificateur produit le signal de sortie (Figure 5).
 Figure 5 : Avec un capteur de proximité capacitif, un circuit oscillant produit un champ électrostatique qui change de caractéristiques lorsque la cible à détecter pénètre dans le champ. (Source de l'image : SICK)
Figure 5 : Avec un capteur de proximité capacitif, un circuit oscillant produit un champ électrostatique qui change de caractéristiques lorsque la cible à détecter pénètre dans le champ. (Source de l'image : SICK)
Comme pour les capteurs de proximité inductifs, il existe plusieurs spécifications relatives à la distance de détection des capteurs de proximité capacitifs, notamment les distances Sn et Sa, ainsi qu'un facteur de réduction. Par exemple, le modèle CM12-08EBP-KC1 présente une distance Sn de 8 mm et une distance Sa nominale de 5,76 mm.
L'objet à détecter doit être au moins aussi grand que la surface du capteur et la distance de détection varie en fonction du facteur de réduction du matériau. Les facteurs de réduction sont liés à la constante diélectrique du matériau et peuvent varier de 1 pour les métaux et l'eau à 0,4 pour le polychlorure de vinyle (PVC), 0,6 pour le verre et 0,5 pour la céramique.
Capteurs magnétiques
Les capteurs de proximité magnétiques réagissent à la présence d'un aimant. Les capteurs de proximité magnétiques de SICK utilisent deux technologies de détection :
- Les capteurs magnéto-résistifs géants (GMR) sont basés sur des résistances qui changent de valeur en présence d'un champ magnétique. Un pont de Wheatstone est utilisé pour détecter le changement de résistance et produire un signal de sortie. Les capteurs pour vérins MZT7, comme le modèle MZT7-03VPS-KP0 conçu pour être utilisé avec des vérins à rainure en T, utilisent la technologie GMR pour détecter le positionnement du piston dans les entraînements pneumatiques et dans des applications similaires.
- La technologie LC utilise un circuit résonant qui résonne avec une faible amplitude. Si un champ magnétique externe s'approche, l'amplitude de la résonance augmente. Cette augmentation est détectée par un évaluateur de signaux et un amplificateur produit le signal de sortie (Figure 6). Le modèle MM08-60APO-ZUA présente une distance Sn de 60 mm et une distance Sa de 48,6 mm.
 Figure 6 : Dans un capteur de proximité magnétique, la sonde de champ peut utiliser la technologie GMR ou LC. (Source de l'image : SICK)
Figure 6 : Dans un capteur de proximité magnétique, la sonde de champ peut utiliser la technologie GMR ou LC. (Source de l'image : SICK)
Capteurs à ultrasons
Pour les objets situés à une distance maximale de 8 m, les concepteurs peuvent se tourner vers des capteurs à ultrasons comme ceux de la famille UM30 de SICK. Ces capteurs intègrent une compensation de température pour améliorer la précision des mesures et fournir une détection d'objet indépendante de la couleur, une immunité à la poussière et un fonctionnement jusqu'à +70°C. Ils mesurent les distances en se basant sur la technologie de temps de vol où la distance est égale à la vitesse du son multipliée par le temps de vol acoustique total (t2), le total étant divisé par 2 (Figure 6).
 Figure 7 : Les capteurs à ultrasons peuvent mesurer la distance en fonction du temps de vol total (t2) des ondes sonores. (Source de l'image : SICK)
Figure 7 : Les capteurs à ultrasons peuvent mesurer la distance en fonction du temps de vol total (t2) des ondes sonores. (Source de l'image : SICK)
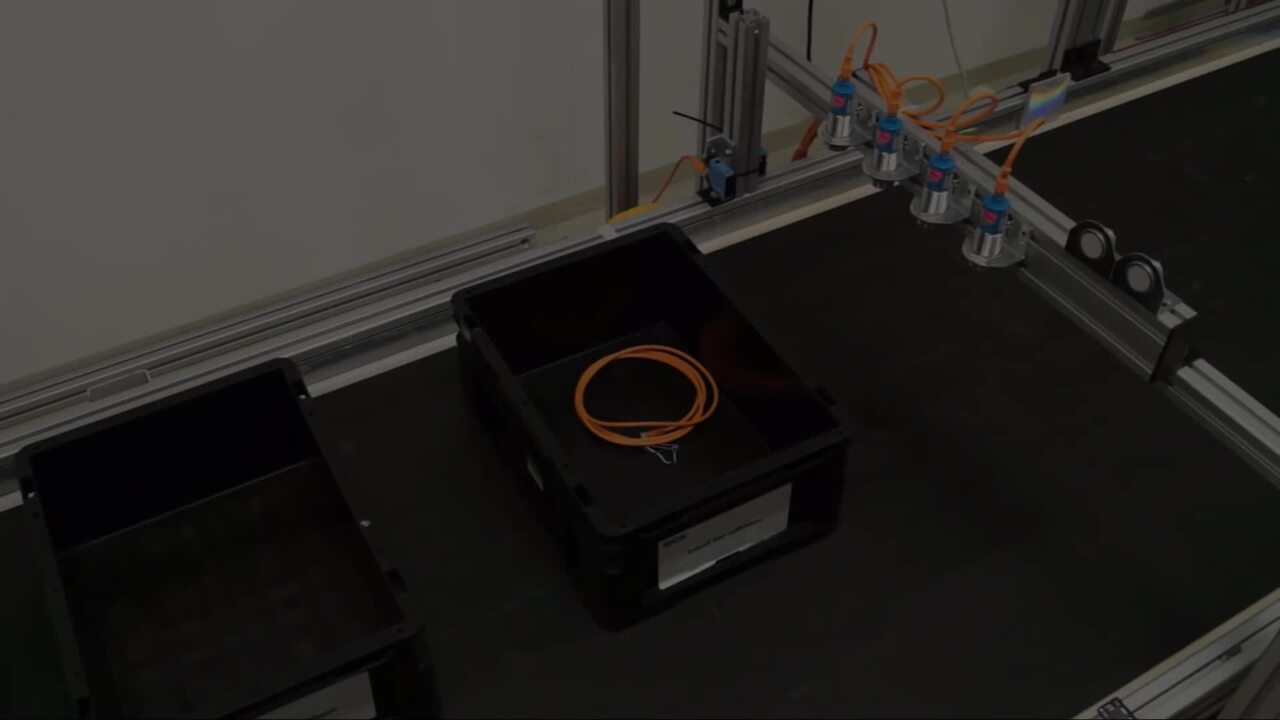
Les capteurs à ultrasons comme le modèle UM30-212111 sont adaptés aux applications telles que la surveillance des bacs vides. Un moniteur de température interne permet d'obtenir une précision de mesure de ±1 %. Ces capteurs indépendants de la couleur peuvent détecter des objets difficiles à distinguer, même en présence de saleté et de poussière.
Conclusion
Bonne nouvelle : il existe un large choix en matière de technologies de capteurs de proximité et de distance. Cela signifie qu'il existe une solution pour toutes les exigences des applications. Le défi consiste à faire le tri parmi les nombreux choix et à trouver la solution optimale pour la détection de matériaux spécifiques dans des conditions d'application et de fonctionnement réelles.
Avertissement : les opinions, convictions et points de vue exprimés par les divers auteurs et/ou participants au forum sur ce site Web ne reflètent pas nécessairement ceux de DigiKey ni les politiques officielles de la société.