Les nouveaux actionneurs piézoélectriques améliorent la rétroaction haptique des écrans tactiles portables
Avec la contribution de Rédacteurs nord-américains de DigiKey
2020-02-13
Les interfaces utilisateur à écran tactile deviennent omniprésentes en raison de leurs avantages évidents par rapport aux interfaces mécaniques. Pour les utilisateurs grand public, l'interface est simple et intuitive, et pour les utilisateurs industriels, un écran étanche évite les problèmes d'infiltration de saleté et d'humidité. Mais il y a des inconvénients pour les deux groupes d'utilisateurs. Par exemple, les utilisateurs grand public peuvent passer à côté du confort et de la satisfaction que procure le clic d'un commutateur mécanique, tandis que les utilisateurs industriels peuvent avoir du mal à confirmer la pression d'un bouton s'ils utilisent l'écran tactile avec une main gantée.
La rétroaction haptique, par laquelle les vibrations indiquent le fonctionnement des boutons, a été utilisée pour pallier le manque de rétroaction des écrans tactiles, mais les solutions existantes ont tendance à utiliser des systèmes mécaniques encombrants et complexes. Il s'agit notamment de moteurs vibrants à masse rotative excentrique (ERM) et d'actionneurs linéaires résonants (LRA). La rétroaction haptique piézoélectrique offre une alternative plus compacte et plus flexible. Toutefois, jusqu'à récemment, les hautes tensions de fonctionnement associées rendaient difficile son utilisation dans les applications à basse consommation d'énergie - une exigence cruciale pour les produits finis alimentés par batterie.
Cependant, les avancées dans les solutions haptiques piézoélectriques « haute définition » ne répondent pas seulement aux préoccupations en matière de consommation d'énergie, mais apportent également d'autres avantages à la conception d'interface haptique, notamment un facteur de forme compact et extra-plat, une rétroaction à force élevée et un temps de réponse rapide.
Cet article explore brièvement les avantages des nouveaux actionneurs haptiques piézoélectriques par rapport aux systèmes ERM et LRA avant de présenter une nouvelle génération de dispositifs basés sur des structures multicouches et des modes de commandes bipolaires qui, associés à des circuits d'attaque dédiés efficaces, répondent aux préoccupations de consommation d'énergie. L'article montre ensuite comment un ingénieur peut tirer parti de ces actionneurs et circuits d'attaque dans son prochain produit à rétroaction haptique d'écran tactile en utilisant des exemples haptiques de TDK et des circuits d'attaque de Boréas Technologies et Texas Instruments (TI).
Options de rétroaction haptique
Les concepteurs qui souhaitent ajouter une rétroaction haptique à leur interface d'écran tactile ont le choix entre trois options : ERM, LRA et actionneurs piézoélectriques. Ces trois options fonctionnent en appliquant le même principe de base, selon lequel un microcontrôleur supervise le fonctionnement et un circuit d'attaque commande un actionneur pour générer des vibrations (Figure 1). Les différences résident dans la manière dont ces vibrations sont créées : l'option ERM utilise une masse rotative excentrée, l'option LRA utilise une masse magnétique suspendue par des ressorts hélicoïdaux, et le dispositif piézoélectrique repose sur l'effet piézoélectrique (inverse) qui provoque un changement des dimensions d'un quartz ou d'un objet en céramique lorsqu'il est soumis à un champ électrique.
 Figure 1 : Le système d'écran tactile haptique comprend un microcontrôleur, un circuit d'attaque et un actionneur. Dans cet exemple, l'actionneur est un dispositif piézoélectrique, mais les systèmes ERM et LRA sont des alternatives populaires. (Source de l'image : Boréas Technologies)
Figure 1 : Le système d'écran tactile haptique comprend un microcontrôleur, un circuit d'attaque et un actionneur. Dans cet exemple, l'actionneur est un dispositif piézoélectrique, mais les systèmes ERM et LRA sont des alternatives populaires. (Source de l'image : Boréas Technologies)
Les systèmes ERM et LRA se sont révélés populaires pour les conceptions portables, principalement parce qu'ils offrent une option basse tension (environ 3 V) et nécessitent une conception de circuit d'attaque simple. En revanche, les dispositifs piézoélectriques classiques requièrent des tensions beaucoup plus élevées (jusqu'à 200 V) pour générer une déformation mécanique suffisante pour une expérience utilisateur satisfaisante. Ces hautes tensions sont nécessaires parce que la technologie de circuit d'attaque haptique piézoélectrique conventionnelle repose généralement sur une technologie d'amplificateur audio réduite, plutôt que d'avoir été conçue à partir de zéro avec un objectif de basse consommation. Un autre défi de conception est le manque de circuits d'attaque d'actionneurs haptiques basse consommation, obligeant les concepteurs à se tourner vers des solutions moins efficaces.
Cependant, un avantage clé des solutions piézoélectriques est qu'elles supportent une haptique haute définition qui améliore la rétroaction au-delà de la simple vibration monotone. Par exemple, les actionneurs piézoélectriques peuvent produire des vibrations dont la fréquence et l'amplitude varient, et ils peuvent être utilisés pour signifier différents résultats d'une pression sur un seul bouton (Figure 2).
") Figure 2 : Les actionneurs haptiques piézoélectriques permettent une plage de vibrations servant à indiquer différents résultats de l'activation d'un seul bouton. (Source de l'image : Boréas Technologies)
Figure 2 : Les actionneurs haptiques piézoélectriques permettent une plage de vibrations servant à indiquer différents résultats de l'activation d'un seul bouton. (Source de l'image : Boréas Technologies)
En résumé, les solutions de rétroaction haptique haute définition exigent :
- Large bande passante : pour permettre une plage de modes et de fréquences de vibration
- Haute accélération [g] : pour une force de rétroaction supérieure
- Grand déplacement : augmentant la sensibilité de rétroaction haptique
- Faible latence : un temps de réponse rapide augmente la plage de rétroaction
Le Tableau 1 résume les performances de chacune des solutions de rétroaction haptique et démontre que les solutions piézoélectriques sont le seul choix pour les applications haute définition car elles offrent la combinaison requise de largeur de bande, de sensibilité et de force de rétroaction, et de latence.
|
Tableau 1 : Comparaison des caractéristiques opérationnelles des solutions de rétroaction haptique. Les dispositifs piézoélectriques offrent l'accélération (mesurée en « g », où 1 g est l'accélération due à la gravité à la surface de la terre (9,81 m/s2)), le déplacement et le temps de réponse corrects, ainsi que les formes d'ondes personnalisées requises pour la rétroaction haptique haute définition. (Source de l'image : DigiKey, via l'auteur)
Notez qu'une partie de la complexité de circuit d'attaque supplémentaire pour les actionneurs piézoélectriques résulte de la fonctionnalité supplémentaire requise pour générer les formes d'ondes personnalisées qui apportent la définition et le contexte à la rétroaction haptique. Les systèmes ERM et LRA ne pouvant pas prendre en charge les formes d'ondes personnalisées, les circuits d'attaque sont donc plus simples.
Avantages des nouveaux dispositifs de rétroaction haptique piézoélectrique
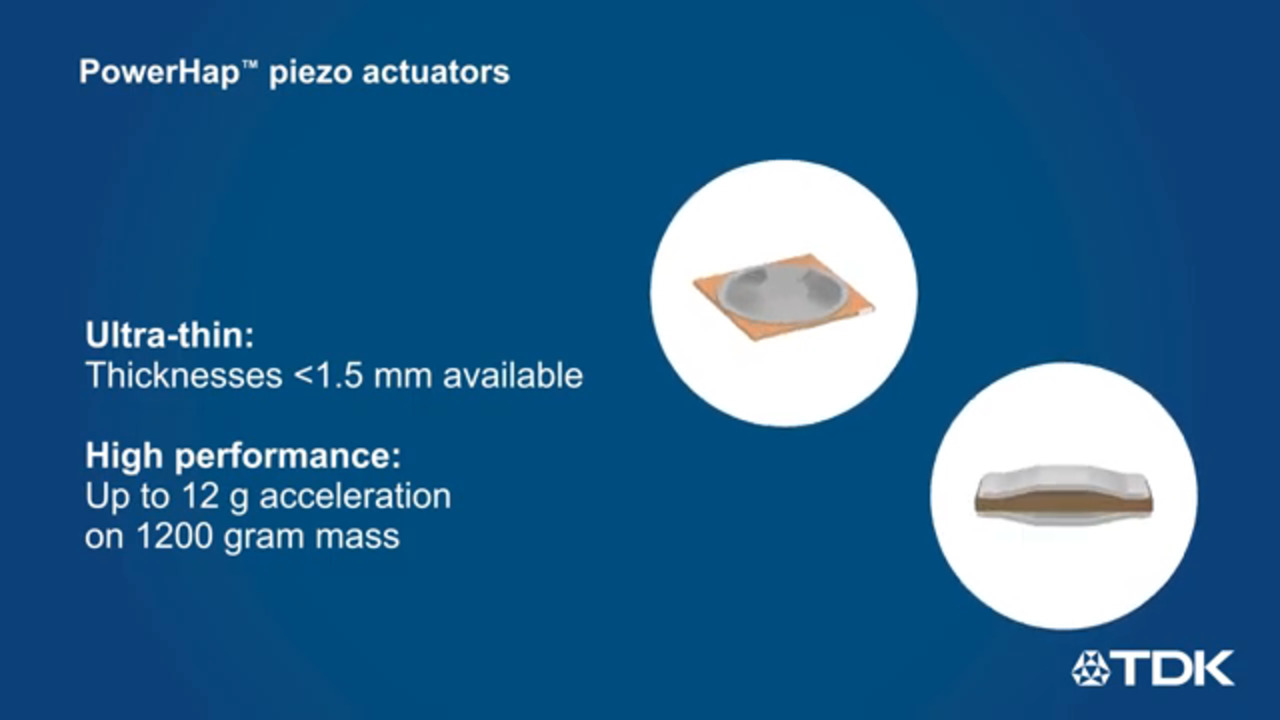
Les récentes introductions de produits, tant pour les actionneurs piézoélectriques que pour les circuits d'attaque dédiés efficaces, ont fait de ces technologies une bien meilleure solution pour les produits alimentés par batteries. Par exemple, les produits haptiques piézoélectriques récemment lancés, tels que le PowerHap B54102H1020A001 (12,7 millimètres carrés (mm2) de surface) et le B54101H1020A001 (26 mm2) de TDK, présentent une hauteur inférieure à 2,5 mm et utilisent une structure multicouche au lieu de la couche unique employée par les dispositifs basés sur la technologie d'amplificateur audio. Cette structure multicouche allège dans une certaine mesure les exigences imposées au circuit d'attaque en abaissant la tension de commande (entre 60 V et 120 V).
Chaque couche du produit multicouche de TDK ne se dilate que légèrement dans la direction « z » en raison de l'effet piézoélectrique inverse. Cependant, comme le dispositif piézoélectrique doit maintenir un volume constant, les couches se contractent simultanément dans les dimensions « x » et « y ».
Le produit de TDK amplifie mécaniquement cette contraction en utilisant une paire de cymbales à chaque extrémité du dispositif piézoélectrique pour augmenter le mouvement de l'axe z d'un facteur 15, atteignant un déplacement de 35 à 65 micromètres (µm) selon le modèle (Figure 3). Sous une charge de 100 grammes (g) (fonctionnement unipolaire, onde sinusoïdale à une seule impulsion, 200 Hz), l'actionneur plus grand de TDK atteint une accélération de 30 g crête-à-crête après seulement 1 milliseconde (ms). La plage de fréquences de 1 à 1000 hertz (Hz) permet aux concepteurs de développer sur mesure des profils de rétroaction haptique haute définition.
 Figure 3 : Les actionneurs haptiques piézoélectriques de TDK utilisent une structure multicouche et des cymbales pour amplifier le mouvement de l'axe z. (Source de l'image : TDK)
Figure 3 : Les actionneurs haptiques piézoélectriques de TDK utilisent une structure multicouche et des cymbales pour amplifier le mouvement de l'axe z. (Source de l'image : TDK)
Les actionneurs haptiques piézoélectriques de TDK peuvent fonctionner en mode unipolaire ou bipolaire. Le fonctionnement unipolaire applique une tension positive sur l'actionneur tandis que le fonctionnement bipolaire fait varier la tension entre les valeurs de crête positive et négative. L'avantage du fonctionnement bipolaire est que l'on peut obtenir un plus grand déplacement pour la même tension crête-à-crête, ou un déplacement égal avec une tension crête-à-crête plus faible. L'inconvénient est que le fonctionnement bipolaire augmente les charges mécaniques et électriques sur l'actionneur (Figure 4).
 offers the same mechanical displacement as unipolar") Figure 4 : Le fonctionnement bipolaire (à droite) offre le même déplacement mécanique que le fonctionnement unipolaire, mais en utilisant une tension crête-à-crête plus faible. (Source de l'image : TDK)
Figure 4 : Le fonctionnement bipolaire (à droite) offre le même déplacement mécanique que le fonctionnement unipolaire, mais en utilisant une tension crête-à-crête plus faible. (Source de l'image : TDK)
Les fournisseurs de puces ont également dévoilé récemment des puces de circuit d'attaque spécialement conçues pour les applications de rétroaction haptique. Ces conceptions améliorées sont capables de produire une gamme de modes de vibration sur une plage fréquences correcte et d'offrir des caractéristiques de commande unipolaire ou bipolaire tout en fonctionnant avec un rendement beaucoup plus élevé que les conceptions précédentes. Les exemples incluent le circuit d'attaque haptique piézoélectrique BOS1901CQT de Boréas Technologies et le circuit d'attaque de puissance moteur DRV2667 de Texas Instruments.
Le circuit intégré de Boréas Technologies est un circuit d'attaque d'actionneur piézoélectrique monopuce qui intègre une technologie de récupération d'énergie et qui est capable de générer de multiples signaux de vibration. La puce peut commander des actionneurs jusqu'à 190 Vpk-pk à partir d'une alimentation de 3 V à 5,5 V. Le BOS1901 utilise une interface périphérique série (SPI) haute vitesse et tous les paramètres sont réglables via le circuit d'entrée numérique. Son temps de démarrage typique de moins de 300 microsecondes (μs) se traduit par une faible latence.
La puce de TI est un circuit d'attaque haptique piézoélectrique doté d'un commutateur élévateur intégré de 105 V et d'un circuit d'entrée numérique capable de commander des actionneurs à haute et basse tension. Le circuit d'entrée numérique libère le microprocesseur de la charge de génération PWM (modulation de largeur d'impulsion) ou de la nécessité d'utiliser des canaux analogiques supplémentaires dans le système hôte. La puce inclut une mémoire dédiée pour stocker et rappeler les formes d'ondes, ainsi qu'un synthétiseur de formes d'ondes avancé. Un temps de démarrage typique de 2 ms limite la latence, et une protection contre les surcharges thermiques empêche que le dispositif soit endommagé en cas de surcharge.
Conception d'un système haptique piézoélectrique
Les puces de Boréas et TI sont conçues pour fonctionner dans un système tactile qui inclut déjà un processeur d'application. Le processeur déclenche l'exécution de la rétroaction haptique via une interface SPI. Le concepteur peut également utiliser une entrée analogique pour déclencher des effets haptiques (Figure 5).
 Figure 5 : Circuit d'application montrant le circuit d'attaque de puissance moteur DRV2667 de TI. Les événements haptiques sont déclenchés par le processeur d'application d'écran tactile avec la puce de TI qui commande ensuite le dispositif haptique piézoélectrique. (Source de l'image : Texas Instruments)
Figure 5 : Circuit d'application montrant le circuit d'attaque de puissance moteur DRV2667 de TI. Les événements haptiques sont déclenchés par le processeur d'application d'écran tactile avec la puce de TI qui commande ensuite le dispositif haptique piézoélectrique. (Source de l'image : Texas Instruments)
Grâce au niveau d'intégration des derniers circuits d'attaque, la conception de systèmes d'écran tactile avec rétroaction haptique piézoélectrique a été facilitée, mais certains choix de composants sont importants pour optimiser les performances de la conception. Par exemple, la tension d'élévation (BST) doit être supérieure de 5 V à la tension de crête à laquelle l'actionneur piézoélectrique sera soumis. Cela permet un certain degré de surcharge de l'amplificateur. Le réglage est défini avec le réseau de diviseurs de résistances R1/R2 illustré à la Figure 5.
La formule pour calculer les valeurs des résistances est la suivante : V(BST) = V(FB) x (1 + R1/R2), où V(FB) = 1,32 V.
Ainsi, par exemple, pour atteindre la capacité V(BST) maximale du circuit d'attaque TI de 105 V, les valeurs R1 et R2 pourraient être respectivement de 768 kilohms (kΩ) et 9,76 kΩ.
Le courant d'élévation de crête est absorbé dans l'alimentation via l'inductance L1. Ce courant est déterminé par R(EXT), mais il faut veiller à choisir une inductance qui puisse supporter la limite de courant programmée (ILIM). La relation entre R(EXT) et ILIM est déterminée par la formule :
![]()
Où K = 10 500, VREF = 1,35 V, RINT (la résistance interne du circuit d'attaque) = 60 Ω, et ILIM = la limite de courant de crête de L1.
Le choix de l'inductance est important pour garantir les meilleures performances du circuit d'attaque. Dans le cas de la puce de TI, les inductances recommandées s'étendent de 3,3 à 22 microhenrys (μH). Le compromis est de choisir entre une inductance plus grande pour réduire les pertes de commutation du convertisseur élévateur ou une inductance plus petite pour maximiser son courant de sortie.
Les principales spécifications électriques de l'actionneur haptique piézoélectrique du point de vue du circuit d'attaque sont la tension nominale et la capacité. À la fréquence maximum de 500 Hz du circuit d'attaque de TI, par exemple, le dispositif est optimisé pour commander jusqu'à 50 nanofarads (nF) à 200 Vpk-pk (la capacité d'excursion de tension la plus élevée du circuit d'attaque). La puce peut commander des capacités plus importantes si la tension d'élévation programmée est abaissée et/ou si l'utilisateur limite la plage de fréquences d'entrée à 300 Hz, par exemple.
Un autre choix important de composant est le condensateur élévateur (C(BST)). Le condensateur doit avoir une tension nominale au moins égale à celle de la tension d'élévation, et de préférence supérieure. Par exemple, un condensateur de 100 nF à tension nominale de 250 V, de type X5R ou X7R est recommandé lors du fonctionnement à la tension d'élévation maximale de 105 V de la puce de TI. C(BST) doit avoir une capacité de fonctionnement minimum d'au moins 50 nF. Pour V(BST) de 30 V à 80 V, un condensateur de 100 nF à tension nominale de 100 V, est acceptable, et pour V(BST) de moins de 30 V, un condensateur de 0,22 microfarad (μF), 50 V est recommandé.
L'utilisation d'un condensateur de découplage (CBULK) placé à côté de l'inductance est recommandée en raison des exigences de courant de la broche de commutation. Un condensateur céramique de type X5R ou X7R avec une capacité d'au moins 1 μF est recommandé.
Outils de développement
Pour les ingénieurs qui souhaitent expérimenter les capacités des actionneurs haptiques piézoélectriques de TDK avant de s'engager dans le matériel, la société propose le kit d'évaluation PowerHap Z63000Z2910Z 1Z 1 à un canal. Le kit comprend une carte de base, un convertisseur élévateur, une carte de circuit d'attaque de sortie et une carte de microcontrôleur.
Le kit est livré avec un logiciel de configuration qui fonctionne sur un PC sous Windows 7 (ou version ultérieure). Une fois le logiciel chargé, le kit est connecté au PC via un câble USB et alimenté en appliquant 12 V (CC). Le logiciel fournit ensuite une interface pour configurer la réponse haptique de l'actionneur lorsqu'une pression est appliquée. L'interface permet de configurer les paramètres de signal suivants (Figure 6) :
- Amplitude - 5 à 100 % (115 V)
- Fréquence - 20 Hz à 300 Hz
- Forme d'onde (trapézoïdale, onde sinusoïdale carrée, dent de scie)
- Rapport cyclique trapézoïdal - 35 à 75 %
- Nombre de pulsations - 1 à 1000
- Niveau de déclenchement - 0 à 12 V (plus le niveau de déclenchement est bas, plus il faut appuyer fort sur l'actionneur pour activer le signal)
- Temps d'attente (pendant lequel aucune force n'est détectée par l'actionneur)
 Figure 6 : Le logiciel du kit d'évaluation PowerHap de TDK présente une interface de configuration des signaux. Une fois définie, la configuration peut être envoyée au processeur de la carte d'évaluation via le bouton « Transmit configuration ». (Source de l'image : TDK)
Figure 6 : Le logiciel du kit d'évaluation PowerHap de TDK présente une interface de configuration des signaux. Une fois définie, la configuration peut être envoyée au processeur de la carte d'évaluation via le bouton « Transmit configuration ». (Source de l'image : TDK)
Le logiciel permet également à l'ingénieur de créer des formes d'ondes personnalisées. Une fois le logiciel configuré, les informations sont envoyées au processeur du kit via le câble USB.
Un deuxième kit d'évaluation, le PowerHap Z63000Z2910Z1Z44, est spécialement conçu pour les ingénieurs qui utilisent le circuit d'attaque haptique piézoélectrique BOS1901CQT de Boréas. Ce kit inclut une carte de base, un convertisseur élévateur, deux circuits d'attaque et un microcontrôleur. Le kit de base est fourni avec un actionneur haptique piézoélectrique de TDK (Figure 7).
 Figure 7 : Le kit d'évaluation PowerHap Z63000Z2910Z1Z44 de TDK utilise les circuits d'attaque haptiques piézoélectriques de Boréas, et il est conforme au protocole audio USB, ce qui simplifie la configuration. (Source de l'image : TDK)
Figure 7 : Le kit d'évaluation PowerHap Z63000Z2910Z1Z44 de TDK utilise les circuits d'attaque haptiques piézoélectriques de Boréas, et il est conforme au protocole audio USB, ce qui simplifie la configuration. (Source de l'image : TDK)
La carte est connectée à un PC via un câble USB, elle utilise le protocole audio USB standard et elle apparaît en tant que sortie audio normale pour tout ordinateur. Le prototypage de formes d'ondes (jusqu'à 190 Vpk-pk) et la lecture peuvent être effectués en utilisant le protocole audio USB pour prototyper des effets haptiques dans des logiciels tels que MATLAB, Python et Audacity.
Conclusion
La rétroaction haptique avec des actionneurs piézoélectriques, ERM et LRA a amélioré le contrôle des écrans tactiles dans les applications industrielles et grand public. Cependant, grâce aux avancées réalisées en matière de plus basse tension, les actionneurs haptiques piézoélectriques compacts ont étendu les avantages de la rétroaction haptique haute définition aux dispositifs alimentés par batterie.
Dans le même temps, la conception des systèmes haptiques piézoélectriques a été facilitée par l'introduction de circuits d'attaque dédiés qui interfacent avec les processeurs d'application populaires et prennent en charge un large éventail de formes d'ondes. La disponibilité de kits d'évaluation pour ces dispositifs auprès de fournisseurs tels que TDK permet l'expérimentation et le prototypage avant de s'engager dans la conception matérielle.
Avertissement : les opinions, convictions et points de vue exprimés par les divers auteurs et/ou participants au forum sur ce site Web ne reflètent pas nécessairement ceux de DigiKey ni les politiques officielles de la société.